Case 2 DJI Matrice 100 UAV Implementation

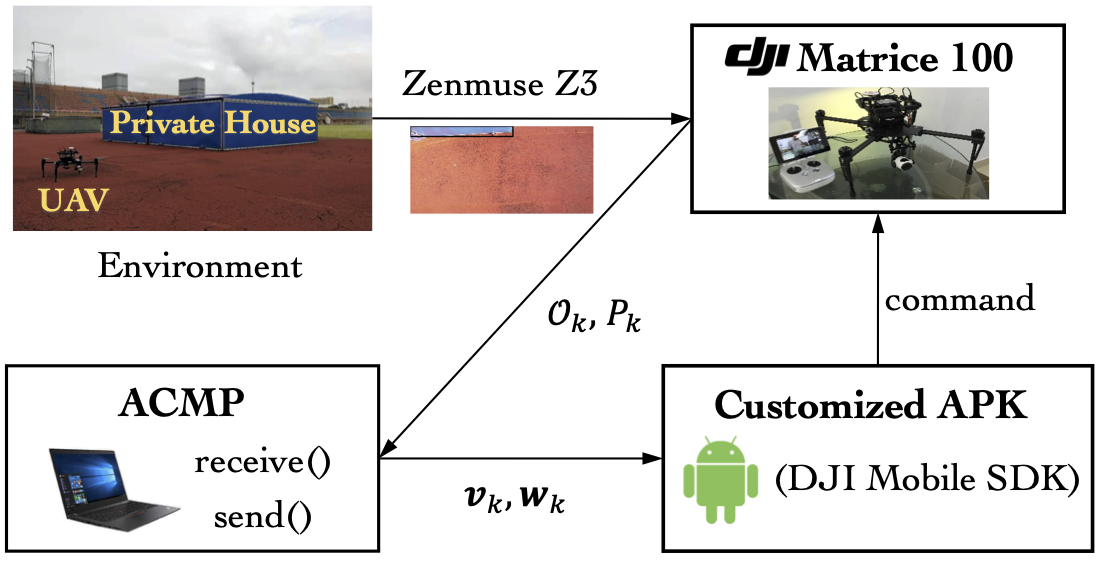
Experiment Setup
The vehicle hardware specifications are:
- Vehicle Type
DJI Matrice 100 - Control Method
DJI Mobile SDK - Sensor
Camera: Zenmuse Z3 (resolution: $1920\times1080 \sim 4096\times 2160$, orientation angle $-90^\circ \sim 30^\circ$) - Laptop
Intel(R) Core(TM) i7-7500U CPU@2.70GHz and NVIDIA GeForce 940MX
Normal Trajectory Following
- The UAV following the reference path with camera orientation down to the ground.
- The flight mission is expected to be completed with the target time ($\Delta_t$) at 24 time steps without any privacy risk.
- Both of the environment and UAV motions are discrete ($20\times20\times10m$), and the UAV moves at the speed of $0.5m/s$, time instant $\tau=2s$, $N=2$, $\omega \in [33.3\%, 100\%]$ , where orientation angles $-90^\circ$ (direct to ground) is represented with $\omega = 100\%$ and $30^\circ$ is $\omega = 33.3\%$.
- Two settings of experiments are evaluated for the approach
- Setting 1
The time budget ($\Delta$) is set as at 48 time steps, with the affected radius of private region is $D_c=4.5m$. - Setting 2
The time budget ($\Delta$) is set as at 30 time steps, with the affected radius of private region is $D_c=4m$.
Adaptation Process of Captain with Setting 1
At the 7th time steps, the UAV detected and located the private house. With Captain the UAV analyzes whether the timeliness and privacy requirement can be satisfied.
After requirement satisfaction checking and analysis, the UAV found that those two requirements cannot be satisfied simultaneously and figured out an compromised resolution to go up, turning the orientation angle and resolution of the camera without exposing the private house.
Finally, the UAV reached the destination cost 26 time steps at the timeliness satisfaction of $DS^1(\mathcal{X}_\xi)=91.7\%$ and privacy preserving satisfaction of $DS^2(\mathcal{X}_{P})=96.6\%$.
Adaptation Process of Captain with Setting 2
At the 8th time steps, the UAV detected and located the private house. With Captain the UAV analyzes whether the timeliness and privacy requirement can be satisfied.
After requirement satisfaction checking and analysis, for the maximal requirement satisfaction, the UAV found that the timeliness requirement can be guaranteed with the compromised privacy-preservation requirement. Thus, it turned the orientation angle along the flight path when affected by the private region detected.
Finally, the UAV reached the destination cost 24 time steps at the timeliness satisfaction of $DS^1(\mathcal{X}_\xi)=100\%$ and privacy preserving satisfaction of $DS^2(\mathcal{X}_{P})=83.1\%$.